Now with the tool grinder placed at its final location, time to have some more study of the electronics. Objective is, to get the drivers turning in the XYZA directions again, and then to determine the path forward. Surely overall intention is to replace the existing PEP control computer by a LinuxCNC-based motion control system, so I can control the machine with ordinary G code and use macros and such to easily do any kinds of grinding cycles without relying on computing technology of the 80s. Also, the affordable technology at the time has been limited to one axis or two axis simultaneous movement, but we are targeting 4 axis (at least 3 axis simultaneous movement. For the Saacke machine, the Y and Z axis were controlled by an independent, TTL logic based “infeed control”, with parameters set by a number of BCD switches at the front panel. Pretty useful for recurring tasks, but hard to program special features just by BCD switches, and, of course, each grinding cycle needs to be set again by hand – you can keep the settings in a notebook but there is no way to just load a program by clicking a button. If you make one mistake on the BCD switch, rotary switch, etc., the machine will likely crash in the old days…
First of all, we need to get power to the electronics, and there is some unreliable start-up condition to the circuits controlling the mains power to the axis drivers and control section. That power is switched through contacts of the K38 contactor, which is turned on if the voltage monitoring contactor K123 is actuated, and the K124 safety contactor is actuated. K124 state depends on the limit switches of the axis, if any of these normally-closed switches opens, power to the drives is immediately cut off, so even in case of some control system malfunction, the power will be interrupted safety. There are nice slide rails, except for the Y axis, where the limits can be set by an Allen key, so that you can limit, say, the X travel to within reasonably safe limits if there are any particular fixtures mounted on the table.

The K123 contactor is actuated if all current signals (closed contacts of the X and A axis drive controls, K400 and K401 relais) and the control voltage (nominal 24 V) is good, but it also has a feature that it will not re-actuate if tripped, by the 3-4 contact pair. So, if there is any fault with motor current or control voltage, even once, the machine will stay in that state until it is power-cycled by the operator (after correcting the error, hopefully).

However, at initial switch-on of the main switch, surely there won’t be any good control voltage, and with the trip function, K123 needs a current path to switch-on at initial power-up, which is done by the K10 time relais. This device closes a contact and actuates K123 for just one second, when powered on, then, opens and stays open until the next power cycle.

It is a little dated version of still available devices from Dold Mechatronics, AI983N.7100. The inner circuit is some simple monoflop circuit, some capacitor, a relais – and, a transformer.

Turns out, there is no voltage on the transformer secondary – the primary winding is open circuit. Heavy glued to the circuit board – these devices are made to be in a vibrating factory environment, but the circuit board is of pretty ordinary quality, not through-plated.

After a quick repair – fortunately had a similar print transformer in stock – and replacement of the electrolytic capacitor, K10 is working fine, and the drives are now powering-on normally each time the mains switch is set to “ON”.
With power now established firmly, to the axis motors. The Y and Z axis (Y is moving the spindle up and down, Z is moving the spindle forth and back – similar logic to a horizontal milling machine) is driven by two independent stepper motors.

These are pretty sizeable Berger Lahr RDM51117/50 frame size 110×110 (NEMA size 42) motors, pretty expensive back in their days, and some of the strongest stepper motor available in the market.

Current rating is about 5 Amp per coil, 500 steps full step, 1000 steps half step.

Because of the lack of computing power and also lack of immediate need, there are two motors, but only one drive! The drive used for infeed automatic control is selected by some switches, including rapid functions. The current is turned off during switch events, surely, never unplug or cut the current of a stepper motor while energized – it will likely damage the driver transistor.

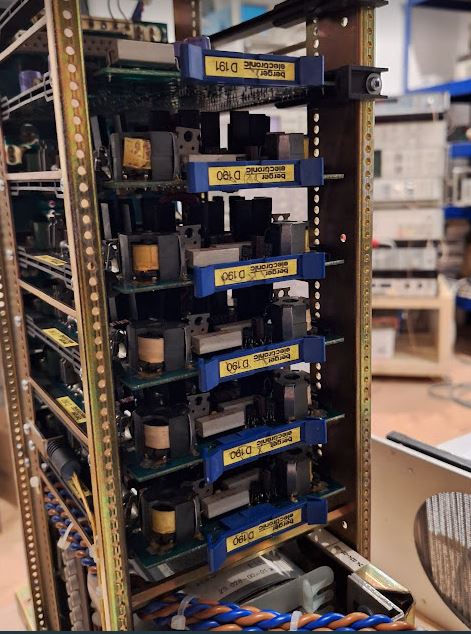
The drives are “Quintronic” NI series drives, very solid built.

Made in Western Germany – probably all hand assembled, and with one dedicated logic control board, and 5 D190 current control boards (one per coil) – powered by a 90 Volts DC supply, rated at 750 VA.

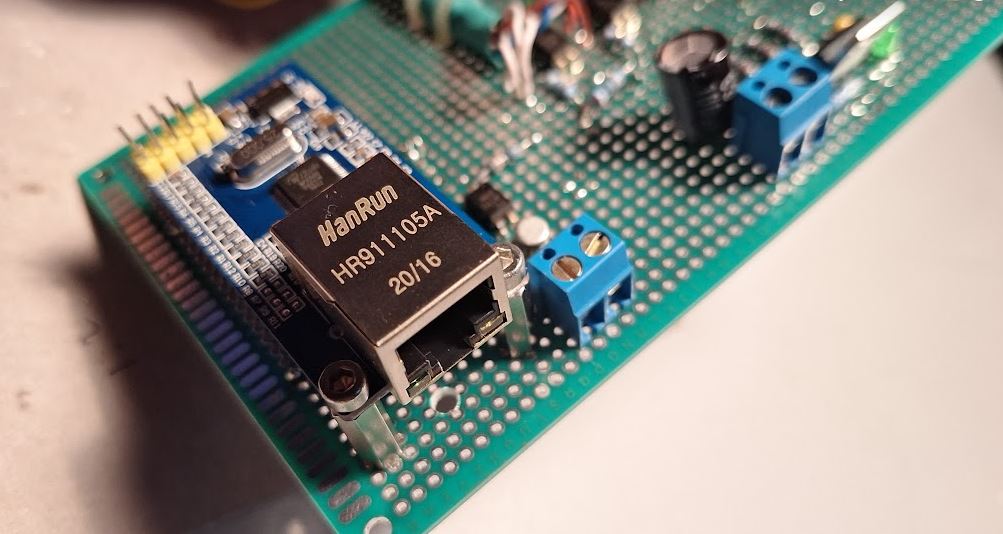
However, before being able to tests these, need to get control signals (TTL level) from the LinuxCNC PC to the old control system (running on 24 V HV-TL, respectively, open collector inputs).
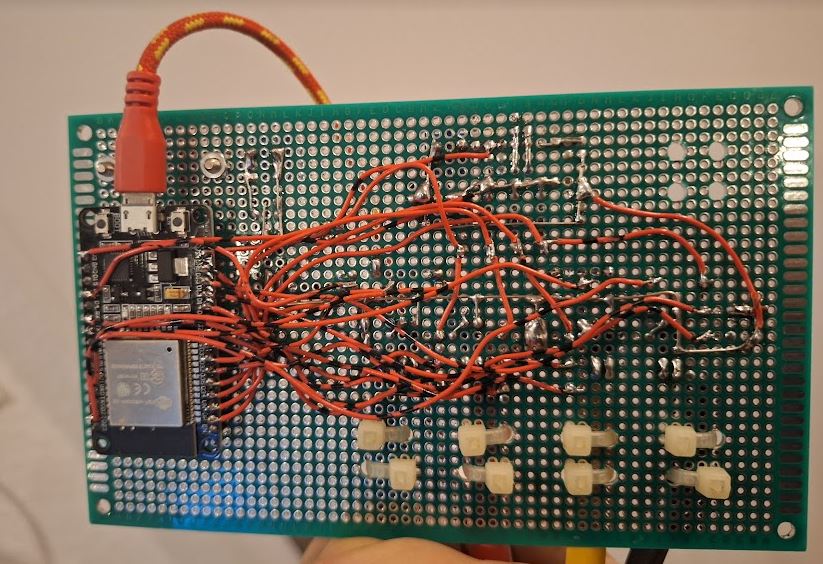
Copying some circuitry I found in the Saacke old interface, using 7406 and 7407 open collector, some resistors, and a high-voltage tolerant LM311 comparator, soldered together a small interface board providing two step and two direction signal conversion. These also connect to some counters for the A and X axis at the front panel that I may use later as an auxiliary display.

In order to select the Y or Z axis controls, I also re-wired some of the feed selector circuitry to two small Finder relais, driven by a small control board.

The control boards – no schematic even needed, just a TTL relais driver, so there is double isolation – the PC TTL level with its own ground and 5/24V rail driving a small relais, which in turn uses the 24 V control voltage of the Saacke machine to actuate the Finder relais. With such industrial controls, contactors, motors, chopper-based drives, etc., it is very critical to use low impedance noise-insensitive circuits, rather than just the thinnest unshielded wire, common power supplies, etc.
The Y and Z motors are switched to the driver by Siemens contactors K200 and K201, which need to carry the 5 Amps DC at a very low resistance, say, 0.1 Ohms, to not upset the current regulator. Coil resistance of the steppers is barely 0.5 Ohms. Generally, I would consider this a problematic setup, firstly, because the contactor resistance may not be held to these very low resistances over time, also, there is no precise timing of the current-off signal to the drives, and the switching (happens at the same time, but may be milliseconds or 10s of milliseconds misaligned). So, there may be some arcing in the contactors, etc., and eventually the contactors or the drives may fail. Upon closer examination, indeed, a different, newer Berger Lahr drive is in the cabinet, compared to the X and A drives. Likely, it had failed, and then been replaced by a unit from a different machine (still has a label corresponding to the “X” axis – the table traverse).

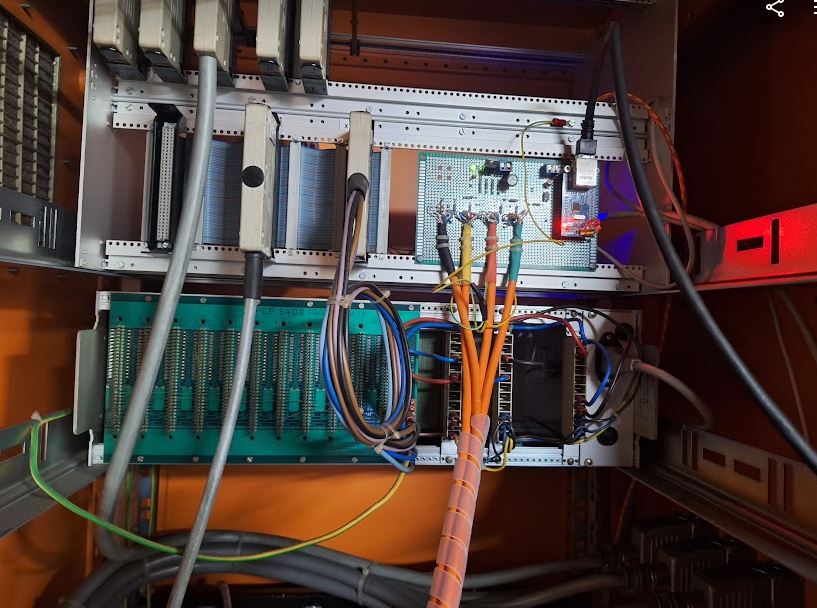
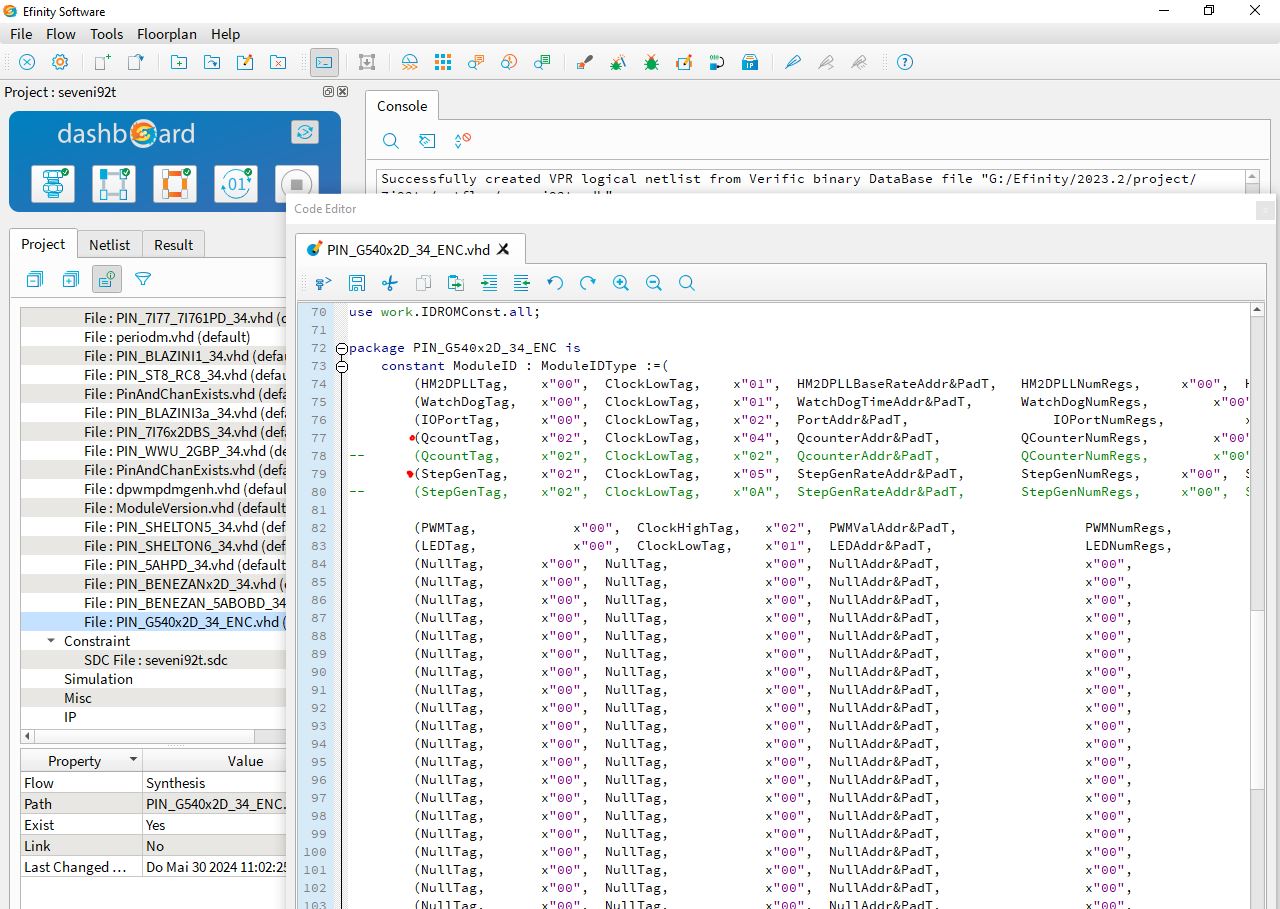
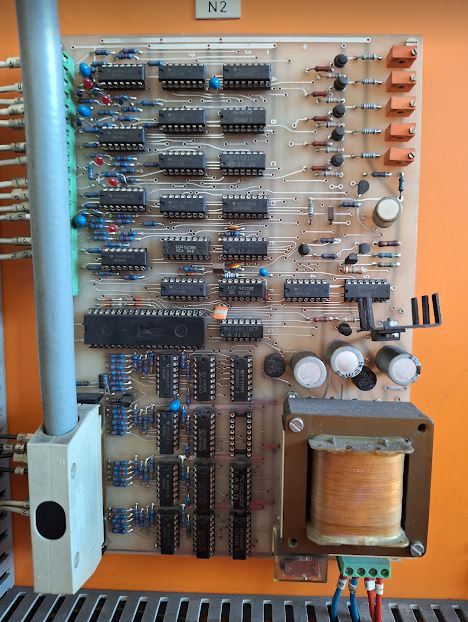
Next, the control circuit – the drives are controlled by common step and direction pulse signals, originating from a rather large card with some TTL logic on it.

For convenience, I added the new small control/level converter boards to one of the old control cards, with a temporary DB15 connector to cable it to the PC.
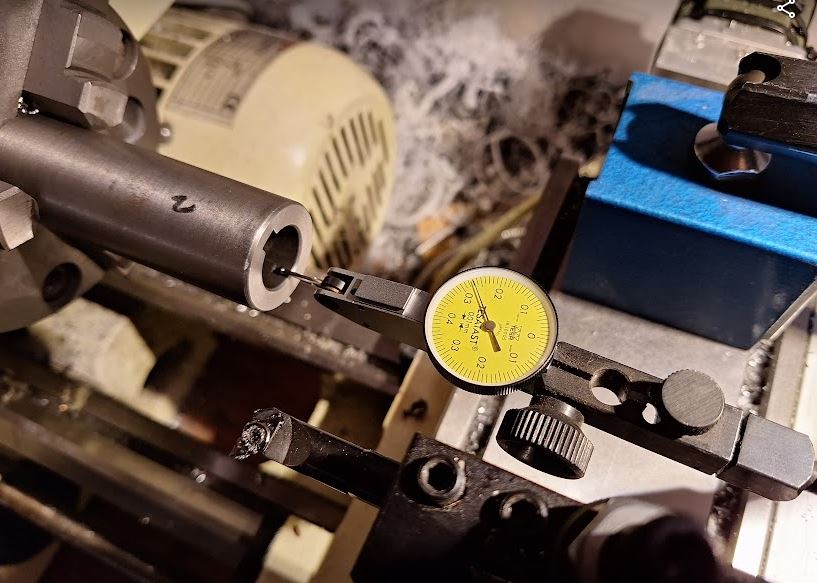
Next up, confirmation of the phase currents. The cables of the stepper motor DC supply are fortunately routed such that a simple clamp-on current meter can be used to probe the current of each motor phase without any need to disconnect cables.

The X driver had one phase at only 3 Amps of current, rather than 5 Amps, strange – the motor was still working normally. Fortunately, I have the manual and schematics (at least the schematics without values and part numbers of the circuit elements) of the D190 current regulator boards of Berger Lahr company, so it was easy to find the culprit. A tantalum cap, not shorted, but soldered with incorrect polarity. Very likely this problem existed since manufacture, and slipped through Berger Lahr’s quality control system. Maybe the tests for quality were done at a lower current, say 3 Amps, because the reversed tantalum acted like a voltage limiter at about 3.5 Volts.

Easy fix, replaced by a multilayer cap.
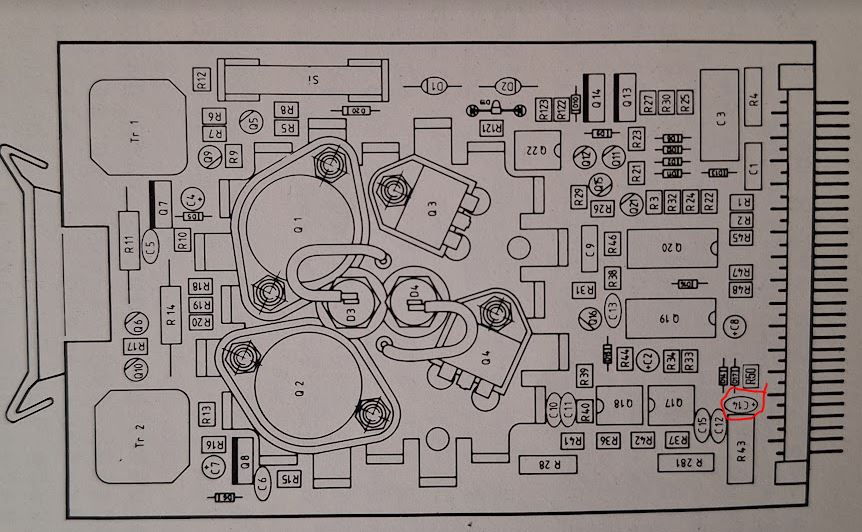
The current input is normally operated at 5 Volts, and a trimpot is used to adjust the phase current of each coil.

Unfortunately, the Y/Z driver has some problems, keeping unstable current regulation on two phases, and after a short time and trying to adjust it, blew the fuse on two of the phases.

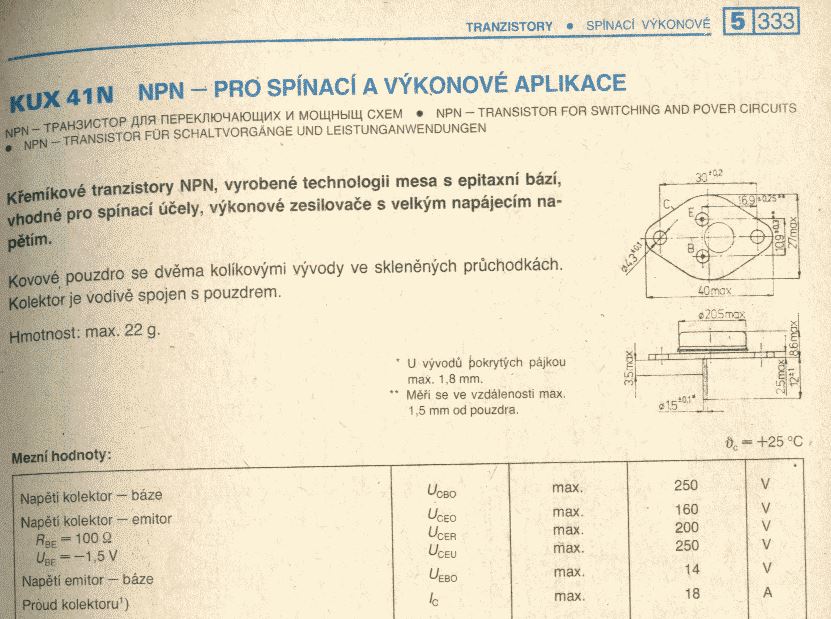
The D190 current control cards apparently used several types of transistors, I tried to collect what I can about these, some are very rare PT1132 transistors, other expensive NTE386, some use BUX41 and PT1132 in mixed (PT1132 for the upper transistor of the H-bridges, BUX41 for the lower). Nowadays, we would design that with MOSFETs and some high side drivers, easy enough.

The PT1132 seem to be related to BD245 or similar, or BUxxx series transistors, like, BU426.

Surely, we need NPN transistors with reasonably high gain, to avoid overloading the high-side drive circuit, and rather high voltage resistance (because of the 90 VDC), and fast switching – because the transistors won’t be able to sustain the linear load region to the 0.5 Ohms coil resistance for any length of time.

Later, it seems, Berger Lahr used BUX41 a lot, 200 V, 15 Amp NPN.

Yet, another type of BUX41…

NTE386 devices, very solid devices, but expensive, more than 20 EUR a piece!!

Finally, I would like independent motors and controls for both Y and Z, to avoid complicated switching and programming, and surely no full-current switching between driver and motor – surely retire the K200 and K201 contactors.
The are some options,
(1) Repair the Berger Lahr D190 cards – will surely repair these after sourcing some BUX41, but this will need to wait for some winter days and less busy times. Even consider to modify the H bridge on the card, by using MOSFETs and modern drivers. The drivers I have have combinations of PT1132 with BUX41, and PT1132 with RCA 41013 (equivalent to BDY58, NPN 125 V – 10 Amp, current gain of at least 20).
(2) Replace the 5-phase steppers by some NEMA42 bipolar steppers, with conventional microstep drivers – easy to maintain and repair going forwards. Then I would have some spare control cards from the former YZ driver, should any cards of the X and A axis drivers fail.
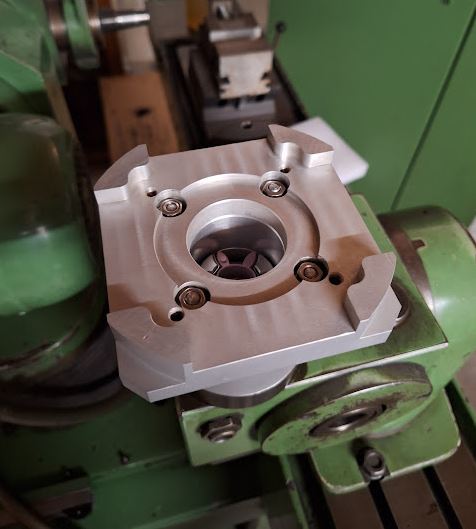
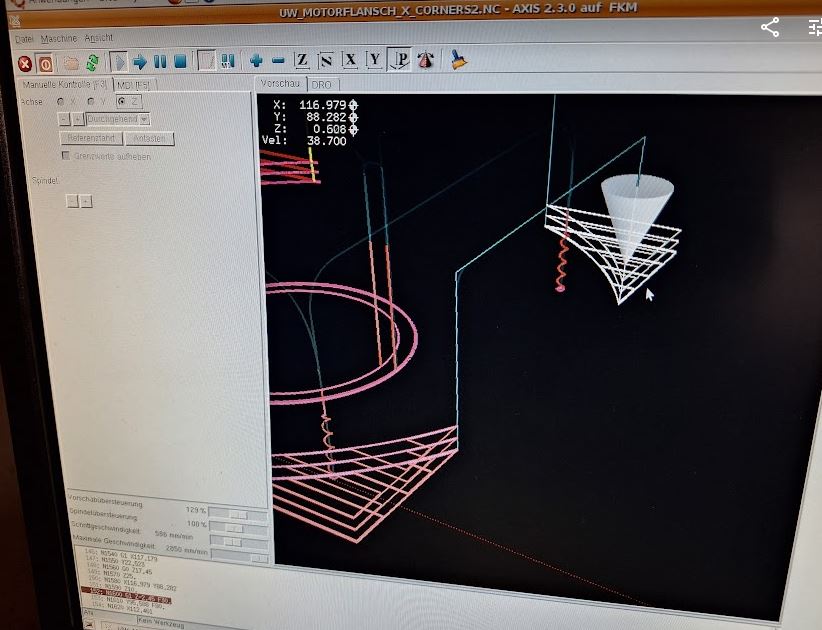
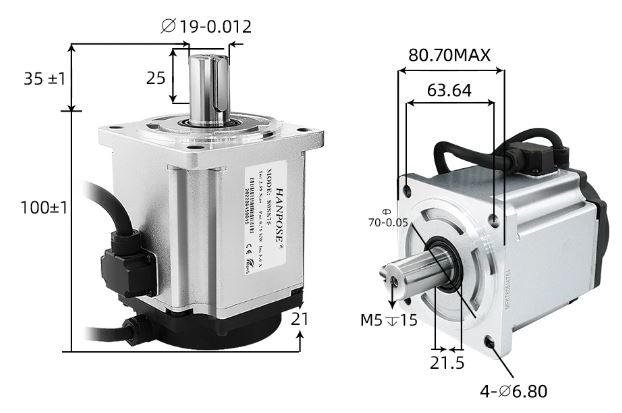
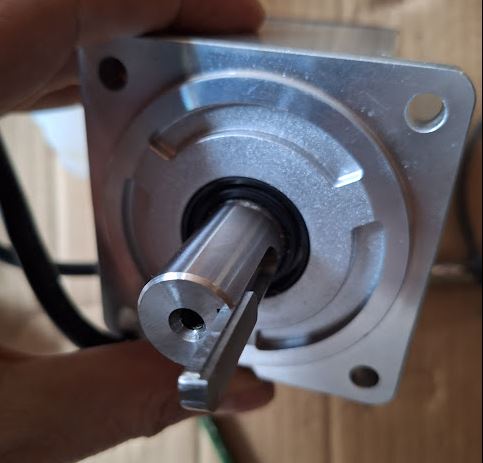
(3) Consider using more modern drive topologies like AC servos with encoders for the Y and Z axis, even for all axis, one I have figured out necessary adaptions of drive geometry (shaft diameters, case diameters).
With all the troubles of the design and state of the Y and Z drives, the X and A axes are working very well, even with the dated drivers and motors. 1000 steps per revolution results in about 3 mikron per step, and the speed of the table can easily reach 500 mm/min and more (mostly limited by the maximum step speed of a LinuxCNC real time step generator over parallel port) – given that it has a ball screw and roller ways, the mechanics would certainly tolerate more without any problem. Also confirmed the very smooth action of the table, mechanically no problem at all with the machine. Also the Y and Z axis – mechanically – are very sound. Cleaned all the screws, guideways etc., from the black dust and grease (better not use grease on grinding machines, but some CLP or HLP 46 oil).